MIT研制出空陆自动切换型无人机技术,构想多年的“飞行车”或将实
本文共 709 字,大约阅读时间需要 2 分钟。
厉害了飞行车,既能在天上飞,也能在地上跑。
麻省理工学院(MIT)的计算机科学和人工智能实验室(CSAIL)开发了一种新型原型,它既可以在空中飞行也可以在地面行驶,且可以实现自由切换。
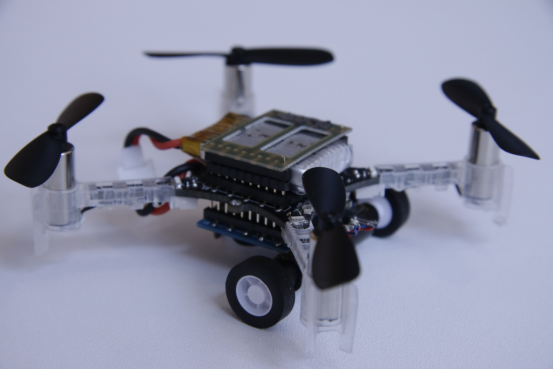
CSAIL的研究人员研制了八架四足无人机,该无人机最大路面行驶距离可达252米,纯飞行可达90米。该团队指出,许多自然界的动物,包括鸟类和昆虫,都能够实现在飞行和步行之间切换,所以他们也要让无人机做同样的事情,并协调运行这两种模式以最大限度地延长电池寿命。
视频中展示了这个概念,当融合了可以随意切换的“飞行车”后,如何利用导航,以相互协调的方式运行,构成一天中的城市交通网。
从视频中可以看出,MIT开发的系统在一个缩小版的城市环境下运行,但该城市模型完全具备了传统的道路、建筑和绿地等因素。理论上,在80辆车同时行驶的情况下,原型机依然可以根据路面情况导航识别出着陆区、街道、禁飞区等区域,准确运行而不会出现问题。
但目前来看,主要的限制之一就是电池寿命,因为纯粹的飞行比在路面行驶需要更多的能量,而现有的电池技术不允许无人机长时间在不充电的情况下连续飞行。但也不是没有解决办法,在理论上,混合系统可以减轻流量,同时最大限度地减少对电池技术改进的需求,将有助于推进该“飞行车”的实现。
虽然这是一个很酷且非常有用的想法,但从全面的系统来看,显然这只是一个开始,从概念到具体的实现,还需很多努力。但理论的基础已完全具备,相信现实的大厦会在不久之后屹立。关于研究情况的进展,镁客网将会持续跟踪报道。
原文发布时间: 2017-06-27 13:50
本文作者: Lynn
本文来自云栖社区合作伙伴镁客网,了解相关信息可以关注镁客网。
转载地址:http://dcqyx.baihongyu.com/
你可能感兴趣的文章
SDN环境搭建(mininet,OVS,ryu安装及命令)
查看>>
CSS后续知识点
查看>>
视频图像处理基础知识0(双线性插值算法进行图像缩放)【转】
查看>>
c语言中基本数据类型printf()对应格式
查看>>
如何保证缓存与数据库的双写一致性?
查看>>
Jar运行的几个方法
查看>>
验证二叉搜索树的golang实现
查看>>
读书笔记《自控力》
查看>>
浅议.NET、ASP.NET和C#的关系
查看>>
12.04 安装svn
查看>>
2017 3月15日 上午
查看>>
基于神念TGAM的脑波小车(1)
查看>>
ceph集群搭建Jewel版本
查看>>
HttpClient 解释
查看>>
111111
查看>>
在Button上面显示图片,去掉Button的默认样式
查看>>
区域生长算法
查看>>
(转)json+flexgrid+jbox组合运用页面刷新<jsp>
查看>>
hive学习2(Navicat连接hive)
查看>>
getResourceAsStream的3种路径配置
查看>>